


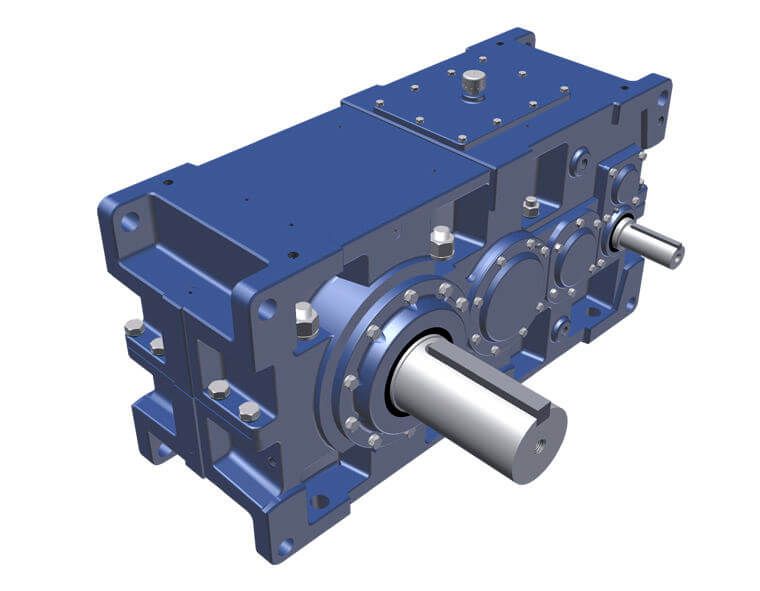

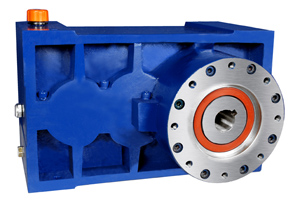

H3-DV6A redutor flender catálogo pdf Helical gear unit H3
In stock
SKU
H3-DV6A
$7,821.43
Flender/Flender Gear Units/Helical gear unit H3
ears. It is also evident that structural lapping has largely removed ank waviness. The average working variation curve assumes an approximately sinusoidal form after structural lapping. Fig. 5.3 Transmission error of skived and structurally lapped gear set2 5 Noise Behavior
approximately sinusoidal form after structural lapping. Fig. 5.3 Transmission error of skived and structurally lapped gear set2 5 Noise Behavior  5.4 Dynamic Noise Excitation 5.4.1 Dynamic of Bevel Gear Running Behavior Section 5.1describes torsional vibration model approximating the complex mechanisms
5.4 Dynamic Noise Excitation 5.4.1 Dynamic of Bevel Gear Running Behavior Section 5.1describes torsional vibration model approximating the complex mechanisms  involved in tooth meshing with the aid of spring and damper elements. In the case of bevel and hypoid gears,
involved in tooth meshing with the aid of spring and damper elements. In the case of bevel and hypoid gears,  the suitability of the reduced equivalent model with single degree of freedom is limited since the displacements of bevel gear set and the associated changes in the relative positions of the tooth anks are not reproduced adequately. The displacements result from the effects described in Sect. 3.4.2 . Much effort must therefore be expended in developing suitable equivalent mechanical model. For power trains, for example, one can develop the equivalent model as multiple body system (MBS) [ BREM9 ]. In the context of multiple body mechanics, the individual components of the power train are reproduced as either rigid or elastic bodies, which are subsequently linked together with the aid of force elements [BREC0a ]. The basic equivalent model consists of the input and pinion shafts, the two output shafts, the ring gear and the differential housing. Initially, the input and output shafts are ideally mounted in order to reduce the degrees of freedom of the individual bodies in the MBS model (Fig. 5.. At the joining points between the input and the pinion shaft and between the two output shafts and the differential Fig. 5.3 Transmission error of ground and structurally lapped gear set5.4 Dynamic Noise Excitation 2 housing, the bodies are linked by force coupling elements in the form of torsional spring elements. The user can specify the speed of rotation of the input shaft and the braking torque on the output shafts. The pinion shaft
the suitability of the reduced equivalent model with single degree of freedom is limited since the displacements of bevel gear set and the associated changes in the relative positions of the tooth anks are not reproduced adequately. The displacements result from the effects described in Sect. 3.4.2 . Much effort must therefore be expended in developing suitable equivalent mechanical model. For power trains, for example, one can develop the equivalent model as multiple body system (MBS) [ BREM9 ]. In the context of multiple body mechanics, the individual components of the power train are reproduced as either rigid or elastic bodies, which are subsequently linked together with the aid of force elements [BREC0a ]. The basic equivalent model consists of the input and pinion shafts, the two output shafts, the ring gear and the differential housing. Initially, the input and output shafts are ideally mounted in order to reduce the degrees of freedom of the individual bodies in the MBS model (Fig. 5.. At the joining points between the input and the pinion shaft and between the two output shafts and the differential Fig. 5.3 Transmission error of ground and structurally lapped gear set5.4 Dynamic Noise Excitation 2 housing, the bodies are linked by force coupling elements in the form of torsional spring elements. The user can specify the speed of rotation of the input shaft and the braking torque on the output shafts. The pinion shaft| Model Type | Helical gear unit H3 |
|---|---|
| Gear Type | Helical Gear |
| Weight (kg) | 365.000000 |
| Ratio Range | 1 : 31.5…112 |
| Low Speed Output | Hollow shaft with shrink disk |
| Nominal Torque | – Nm |
| Mounting Arrangements | Vertical mounting position |
| Manufacturer | Flender de Colombia |
| Country of Manufacture | China |
| Data Sheet & Drawings | H3-DV6A redutor flender catálogo pdf Helical gear unit H3 |
Related Products




